Lo que pretendemos es calcular el error de lo que deseamos en términos de cuanto diferencia hay, si el error es pequeño, es importante agregar una amplificación para poder fácilmente detectar el error que estamos teniendo, lo que quiere es que ese error desaparezca y la salida se apegue a la referencia que tenemos, la señal de control entra a un actuador que va a aumentar el volumen, cambiando según el ruido detectado por el sensor.
Como en mi tarea anterior del modelado matemático del sistema, vamos a sacar un diagrama de bloques para ver de una manera más simple y entender a profundidad el mismo que estamos desarrollando.
Entonces, vamos a expresar estas funciones del reporte anterior en un diagrama de bloques, o sea que es lo que va a pasar internamente del sistema de control, cual va a ser la señal de salida y que va a producir la señal de entrada lo definimos como los componentes del circuito y del micrófono, la señal de salida armónico simple generado del micrófono, al sobrepasar un cierto umbral éste va a cambiar su volumen y generar un audio más estable.
Tenemos el siguiente diagrama de bloques
+22.29.19.png)
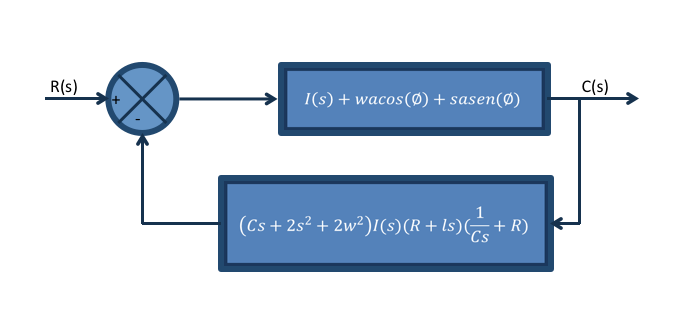



Es importante remarcar, que las señales no se reparten si no que se replican, lo que entra es la variable de la función para producir las salidas entrando R(s) y C(s), combinando bloques en serie, paralelos, retroalimentado.
Referencias.
Ogata, control moderno liga.
Modelado matemático, blog. liga.
Bien; 10.
ResponderEliminar